
Автоматическая перчатка-усилитель
На Ганноверской промышленной ярмарке дебютировала роботизированная перчатка, способная вдвое усиливать захват.
Контроллер, управляющей устройством, с высокой точностью регистрирует перемещения и усилия пальцев человека и использует нелинейные алгоритмы для тонкой подстройки откликов автоматики.
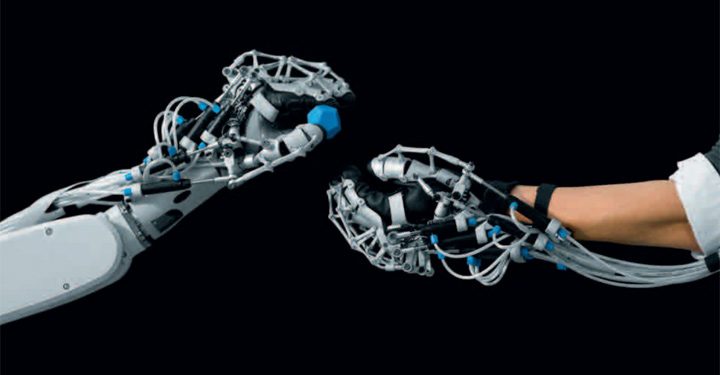
Экспериментальную перчатку-робот ExoHand построила германская компания Festo. Аппарат использует внешний силовой скелет, к которому подведены тяги от крохотных пневмоцилиндров. Последние работают от внешнего источника давления.
Помимо увеличения мощности кисти и снижения усталости работника, ExoHand может решать и иную задачу. В проекте предусмотрен режим удалённой манипуляции. В последнем варианте перчатка играет роль сенсора, передающего движение каждого пальца на компьютер, управляющий манипулятором, стоящим где-то поодаль.
Оператор может наблюдать за действиями контролируемого им робота на экране или через стекло. Такой режим работы перчатки может пригодиться на опасных производствах.

Перчатка также способна превратить в манипулятор какой-либо пассивный объект, скажем искусственную руку из силикона. И аналогичный режим внешнего управления может быть задействован при использовании перчатки в роли протеза. Скажем, если применить сенсоры активности нейронов в моторных участках коры мозга, то с пневмоперчаткой можно восстанавливать подвижность руки у пациентов, страдающих от паралича.
Добавим, что Festo известна нам по пневматической руке, а также роботам медузам, пингвинам и чайке.
Контроллер, управляющей устройством, с высокой точностью регистрирует перемещения и усилия пальцев человека и использует нелинейные алгоритмы для тонкой подстройки откликов автоматики.
Экспериментальную перчатку-робот ExoHand построила германская компания Festo. Аппарат использует внешний силовой скелет, к которому подведены тяги от крохотных пневмоцилиндров. Последние работают от внешнего источника давления.
Помимо увеличения мощности кисти и снижения усталости работника, ExoHand может решать и иную задачу. В проекте предусмотрен режим удалённой манипуляции. В последнем варианте перчатка играет роль сенсора, передающего движение каждого пальца на компьютер, управляющий манипулятором, стоящим где-то поодаль.
Оператор может наблюдать за действиями контролируемого им робота на экране или через стекло. Такой режим работы перчатки может пригодиться на опасных производствах.
Перчатка также способна превратить в манипулятор какой-либо пассивный объект, скажем искусственную руку из силикона. И аналогичный режим внешнего управления может быть задействован при использовании перчатки в роли протеза. Скажем, если применить сенсоры активности нейронов в моторных участках коры мозга, то с пневмоперчаткой можно восстанавливать подвижность руки у пациентов, страдающих от паралича.
Добавим, что Festo известна нам по пневматической руке, а также роботам медузам, пингвинам и чайке.
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.
0
Прототип экзоскелета)
- ↓











